Galil Design Kit
Galil Design Kit
Galil Motion Control Inc. has released the Galil Design Kit. This is Galil's newest software environment, providing easy communication with Galil's motion controllers and PLCs. Galil recently introduced the new scope and tuner to GDK's growing list of tools and capabilities. All tools are customizable by editing the XLM, located in the "more options" menu at the top right corner of the software.
Galil Motion Control Inc. has released the Galil Design Kit. This is Galil's newest software environment, providing easy communication with Galil's motion controllers and PLCs. Galil recently introduced the new scope and tuner to GDK's growing list of tools and capabilities. All tools are customizable by editing the XLM, located in the "more options" menu at the top right corner of the software.
"The scope and tuner tools of GDK now provide customers with the functionality to easily troubleshoot and tune a system," said Amber Ehardt, applications and marketing engineer with Galil Motion Control. "GDK's wide range of tools increases the motion control system's performance and decreases integration time and effort."
- Scope: emulates a traditional digital oscilloscope.
- Tuner: assists in optimizing a system's performance.
- Terminal: sends commands and receives responses from the controller.
- Editor: writes, saves and executes application programs.
- Viewer: enables real-time viewing of the controller's I/O status, motor position and more.
- Setup: reads, edits, saves and restores all controller memory.
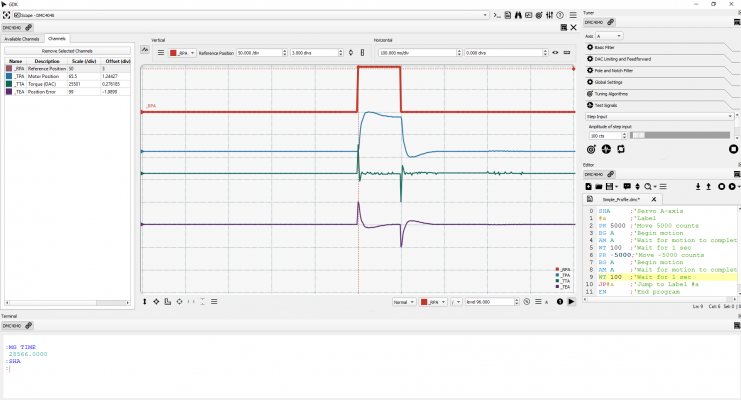
The scope is designed to emulate a traditional digital oscilloscope. It provides intuitive measuring and zooming tools, trigger tools, autoscale and more. There are a variety of trigger modes such as scan, auto and normal, which allow the user to customize their waveform viewing experience. This tool can be used for tuning, measuring motor settling time and overshoot, and measuring characteristics such as resonances and backlash.
The tuner is designed to assist in optimizing a system's performance. It provides a single interface for editing filter parameters such as pole, notch and PID. The user can edit the controller's torque limits, voltage offset and feedforward parameters. The auto-crossover tuning algorithm is customizable, as well as the tuner's test signals. The tuner works seamlessly with GDK's scope tool to provide an adaptable tuning experience.
The viewer tool allows customized real-time viewing of the controller's I/O status, motor position and more. This tool is convenient during troubleshooting and integration, since so many system parameters can be viewed at once. The user can customize what is viewed by editing GDK's XML
The setup tool allows the user to view, edit, backup and load controller memory such as parameters, variables, arrays and the program buffer. This powerful tool enables the user to view all of the controller's important information, save it to a PC and load the information on multiple controllers, or the same controller if a Master Reset was executed or new firmware was loaded. This tool will increase productivity by saving time during integration and troubleshooting.
The terminal tool provides easy communication to and from Galil controllers. It can be used to query the controller's parameters or execute a program. This tool can search command history, repeat or auto repeat commands to print the terminal's output.
The editor tool allows the user to write, save, download, upload and execute application code. With this tool, multiple programs can be opened, edited and saved in one seamless user interface. The editor tool includes toggling comments, a quick go to function and a find/replace mechanism.
GDK's communications library, gclib, now uses a communications server by default. This software layer works as a multiplexer to the hardware and allows multiple applications to communicate with the same controller. Data that was once only available to one application is now distributed to all subscribing clients. The benefit is that an application can leverage all communication features of a Galil controller while an attached debugger, for example GDK, can also have full-featured access. Previously written gclib code can use the server by omitting the "-d" switch in GOpen(). Install the latest version of gclib and GDK to try the new server.