Stationary industrial robots are ideal for performing repetitive, monotonous tasks as parts steadily flow by on a moving production line. But they’re hardly economical when producing massive parts, such as ones for airplanes, ships and wind turbines, because a robot might be idle for days or weeks after performing its task before the next part arrives.
Nonetheless, manufacturing huge parts involves tedious, stressful duties best handled by robots because they help a company’s most-valuable assets, its workers, perform functions more suited to the human body and mind. For those applications, mobile robots that can work side-by-side with people and assist them are desirable. That’s the goal of the VALERI project, short for validation of advanced, collaborative robotics for industrial applications, explained José Saenz, who heads the project at Fraunhofer Institute for Factory Operation and Automation IFF.
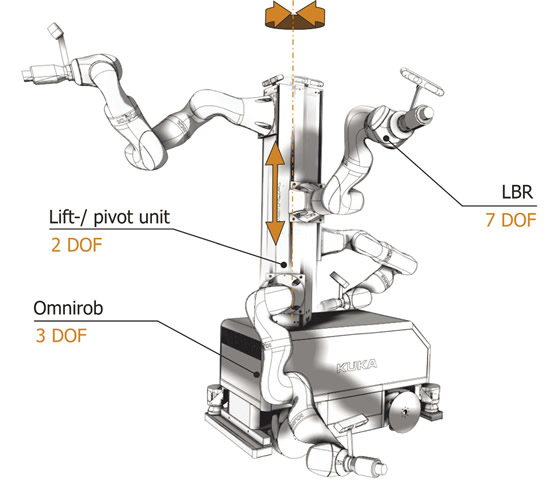
The platform for the VALERI project is the KUKA “omniRob” robot, which possesses 12 degrees of freedom.
“The elements of an airplane fuselage, for example, are too large for them to be adapted to a conventional production robot. You cannot rotate or turn them so that the system can work on them,” he said. “So, it has to be the other way around. The robot drives to the desired location in the airplane.”
The platform for the project is based on the “omniRob” lightweight robot from KUKA Roboter GmbH, Augsburg, Germany, Saenz noted. A multiple-extension grip arm called “the manipulator” is located on a drivable platform. The complete robotic system possesses 12 degrees of freedom to provide a “large action radius,” enabling it to rotate and move forward, backward, up, down and sideways.
The robot already had laser scanners for navigation and force-sensing technology to safeguard the manipulator, and the project team added tactile skin and an optical workspace surveillance system to provide redundancy and worker safety in different modes of operation, Saenz explained. The tactile skin uses touch-sensitive interfaces to stop a robot when it contacts a worker, and the 2½D surveillance system uses four cameras to survey and monitor the workspace. The skin also allows a worker to interact with the robot, such as pushing it to move in a specific direction.
For the initial test application, a robot will apply sealant along airplane components to protect against corrosion. A toolchanger enables the robot to switch between a custom-made sealant application tool, a part detection tool and a sealant inspection tool. Saenz noted the robot has a 7-kg (15 lbs. 7 oz.) carrying capacity. While applying sealant, the robot moves at about 100 mm/sec. (3.94 ips) and has a maximum speed of 1.4 m/sec. (55.12 ips) when traveling to different part locations. “In this situation, where we have parts up to 4m long and want to apply sealant in one go, we’re driving and using the manipulator at the same time,” he said.
Saenz pointed out that the mobile robotic system is scheduled to be ready for the first sealant application demonstration by the end of October and testing under real-life conditions at an Airbus facility by October 2015. “The goal is that, within 1 or 2 years after the end of the project, the complete system is developed far enough that it can be industrially relevant and used,” he said.
The factory of the future, however, will not see robots—mobile or otherwise—driving humans out of the plant, Saenz emphasized. “On the contrary, we want to make them more productive and free them [to do more value-added activities].”
For more information about Fraunhofer Institute for Factory Operation and Automation IFF, Magdeburg, Germany, call +49 391-4090-0 or visit www.iff.fraunhofer.de.
Related Glossary Terms
- degrees of freedom
degrees of freedom
Number of axes along which a robot, and thus the object it is holding, can be manipulated. Most robots are capable of maneuvering along the three basic Cartesian axes (X, Y, Z). More sophisticated models may move in six or more axes. See axis.
- manipulator
manipulator
Arm or basic object-transferring device. Hands or gripping devices vary according to application, as do arm design and number of joints (axes or degrees of freedom). See degrees of freedom; effectuating device.
- robotics
robotics
Discipline involving self-actuating and self-operating devices. Robots frequently imitate human capabilities, including the ability to manipulate physical objects while evaluating and reacting appropriately to various stimuli. See industrial robot; robot.
- toolchanger
toolchanger
Carriage or drum attached to a machining center that holds tools until needed; when a tool is needed, the toolchanger inserts the tool into the machine spindle. See automatic toolchanger.
Author

Alan holds a bachelor’s degree in journalism from Southern Illinois University Carbondale. Including his 20 years at CTE, Alan has more than 30 years of trade journalism experience.