The human finger is a highly functional body part with a range of motion and the dexterity to handle small and fragile objects with low force. Automating that capability would benefit numerous manufacturing applications, from assembling smartphones to making jewelry to performing QC at auto factories, but the end tooling on robots are essentially grippers. A robotic finger wasn’t an option—until now. At the Automate 2015 trade show in Chicago, mechatronic actuator manufacturer SMAC Corp. introduced a prototype of what it calls the first direct-drive, servomotor robotic finger. The finger can contact a surface, recognize that fact and then push, pull or sweep at a programmable force and speed.
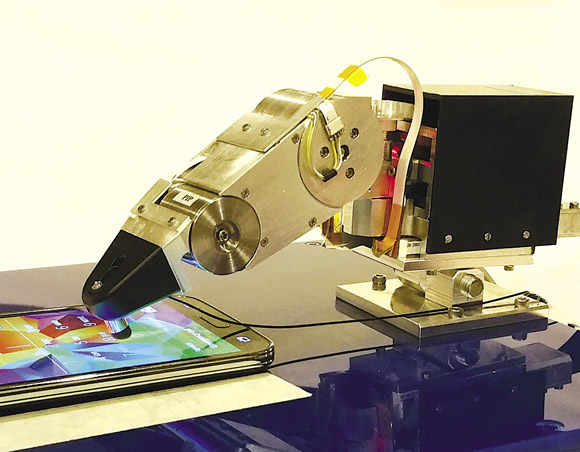
The direct-drive, servomotor robotic finger from SMAC operates a Samsung Galaxy smartphone. Image courtesy SMAC.
While the joint nearest a human fingertip is about 20mm (0.787”) in diameter, the motor used in the robotic finger’s front joint is 25mm (0.984”) in diameter, the company reported. “We have something that is almost the right size,” said Ed Neff, SMAC president, noting a 20mm-dia. motor must provide about 200 mNm of torque while a 25mm motor puts out 135 mNm. “We had about four iterations to get where we are, and we’ve got two more iterations to go. We know what we have to do in order to get it down to the same size as a human finger, which is a target for Toyota.”
Neff explained that the servomotor is “partial,” meaning that it doesn’t move 360°, which allowed the company to create a proprietary magnetic circuit design to increase the torque. “Everybody that tried to do that used standard 360° motors,” he said. “That leads you down the wrong road.”
A larger, 35mm (1.378”) motor acts as the second joint and puts out 630 mNm of torque and, therefore, can exert a force of 7 N at the tip. Both motors move ±45°, which is similar to human joints. A third motor operates as the first joint, which moves side to side. According to the company, these motors have been integrated into a structure that allows them to operate and cover the same movement capability as a human finger. The structure weighs about 350 g (12.35 oz.).
Neff emphasized that the motor must be direct drive because gears do not like to move freely and will break when made to move in the various directions that a finger does.
The company expects to offer the robotic finger early next year and later introduce a robotic thumb and ultimately a robotic hand. The various offerings would enable an end user to take a modular approach.
“If you only need one, you buy a finger,” Neff said. “If you need two, you buy a finger and thumb. If you need three to do something, you buy three.”
For more information about SMAC Corp., Carlsbad, Calif., please call (760) 929-7575 or visit www.smac-mca.com. CTE
Author

Alan holds a bachelor’s degree in journalism from Southern Illinois University Carbondale. Including his 20 years at CTE, Alan has more than 30 years of trade journalism experience.